Scanning New Horizons
The Versatile Impact of LiDAR Technology Across Industries

In an age where precision and accuracy underpin technological advancements, LiDAR technology emerges as a cornerstone in the field of remote sensing and 3D mapping. Standing for Light Detection and Ranging, LiDAR is a cutting-edge method that employs laser light to measure distances and capture the fine details of physical objects and landscapes with remarkable accuracy.

The genesis of LiDAR technology dates back to the mid-20th century, coinciding with the development of laser technology. It has since evolved, riding on the back of rapid technological advancements, into a tool of unparalleled precision in mapping and understanding the physical world. From the dense canopies of rainforests to the bustling streets of mega-cities, LiDAR has illuminated our understanding of complex environments in ways previously unimaginable.
This technology is not just about the lasers and light; it's a fusion of advanced optics, GPS systems, gyroscope/accelerometer technology, and sophisticated data processing algorithms. Together, these components enable LiDAR to produce highly detailed three-dimensional representations of the Earth's surface and built environments, revolutionizing fields as diverse as geography, archaeology, forestry, environmental science, and urban planning.
As we delve deeper into the intricacies of LiDAR technology, we uncover its foundational principles, explore its varied applications, and look ahead at its promising future. This article aims to demystify LiDAR, shedding light on how it works, its significance, and why it stands as a pivotal tool in modern-day geospatial science and technology.
The History of LiDAR Technology
The journey of LiDAR technology is a fascinating tale of innovation and evolution. Its roots can be traced back to the early 1960s, shortly after the invention of the laser. One of the first practical applications of LiDAR was in meteorology, used to measure clouds and atmospheric pollutants. This early version of LiDAR, although rudimentary by today's standards, laid the groundwork for what would become a revolutionary technology.
In the following decades, LiDAR technology saw significant advancements, fueled by improvements in laser precision, computing power, and data processing techniques. The 1970s marked a pivotal era with the introduction of airborne LiDAR systems, initially used for topographic mapping and later for extensive geological and environmental studies. This period saw LiDAR's transition from a scientific curiosity to a practical tool for real-world applications.
The 1980s and 1990s brought about further enhancements, including the integration of Global Positioning System (GPS) technology. This integration allowed for more accurate and detailed geographical mapping, transforming LiDAR into a critical instrument for geospatial professionals. During this time, LiDAR began to be widely used in civil engineering, forestry, and urban planning, offering an unprecedented level of detail in terrain and surface modeling.
Entering the 21st century, LiDAR technology continued to advance rapidly. The development of smaller, more efficient laser sensors and improvements in data processing capabilities enabled the emergence of mobile and terrestrial LiDAR systems. These systems made it possible to capture high-resolution 3D data in a variety of environments, from dense urban areas to remote natural landscapes.
Today, LiDAR stands at the forefront of remote sensing technology, with applications extending into autonomous vehicles, wind farm optimization, and even Mars exploration with NASA's Mars Rover missions. The evolution of LiDAR is a testament to human ingenuity and our relentless pursuit of understanding and mapping the world around us with ever-greater precision and detail.
The Core Principle: Time-of-Flight in LiDAR Technology
The core principle behind LiDAR's distance measurement is the time-of-flight (ToF) method. This involves emitting a laser pulse and measuring the time taken for this pulse to travel to a target, reflect off it, and return to the LiDAR sensor. The laser used in LiDAR emits light in the near-infrared or visible spectrum. These light pulses are highly focused and directed towards specific target areas. As the laser pulse travels through the atmosphere to the target, factors such as atmospheric composition, altitude, and weather conditions can affect its speed slightly. However, for most LiDAR applications, the speed of light is considered constant for simplicity. When the laser pulse hits the target, which could be any physical surface (like the ground, vegetation, or buildings), it reflects back toward the LiDAR sensor. The nature of this reflection can vary depending on the properties of the target (like reflectivity, color, texture). The reflected light, which is often weaker than the emitted pulse, is captured by the LiDAR system's detector. This detector is sensitive enough to capture the faint return signals.
Time Measurement and Distance Calculation
LiDAR systems are equipped with high-precision clocks that measure the time interval between the emission of the laser pulse and the reception of the reflected signal with extreme accuracy. By knowing the time taken (round-trip time) and the speed of light, the distance to the target is calculated using the formula
TWTT is the two-way travel time
d is the distance traveled by the LiDAR pulse (in meters)
c is the speed of light in a vacuum (approximately 3×1083×108 meters per second)
The division by 2 accounts for the round-trip journey of the laser pulse.
A LiDAR system emits millions of pulses per second, each returning information about different points on the target's surface. These individual distance measurements are compiled into a point cloud, a large collection of points that represent the 3D structure of the scanned area. Advanced software interprets this point cloud data to create detailed 3D maps and models, which can be used for various analyses in geography, urban planning, forestry, and other fields.
The time-of-flight method is effective over a wide range of distances, from short-range applications (like industrial measurements) to long-range uses (like topographical mapping from aircraft). The method's accuracy and the ability to quickly gather large amounts of data make LiDAR a powerful tool for rapid and precise 3D mapping across diverse environments. Now let’s take a look at the different types of LiDAR sensors and their applications.
Types of LiDAR Sensors:
Photon Counting LiDAR
Imagine a detective using a magnifying glass to find the smallest clues. Photon counting LiDAR is similar; it's incredibly detailed and can detect even the faintest of light signals. Each photon, a tiny particle of light, is like a clue that helps build a picture of the environment. This LiDAR is so sensitive, that it can detect single photons returning from very far away, making it perfect for studying distant objects like clouds or layers of the atmosphere. It's like being able to hear the softest echo in a vast canyon.
Application: Atmospheric Research and Space Exploration
Photon counting LiDAR is like a super-sensitive tool that can detect the faintest whispers of light, making it perfect for studying distant or diffuse objects. It's commonly used in atmospheric research to measure the height of clouds, track pollutants, and study aerosols in the upper atmosphere. This LiDAR is so precise that it can even be used in space exploration missions to map the surfaces of other planets and moons, where signals can be very weak due to the vast distances involved.

This is a type of visual representation used in atmospheric science. Imagine it like a side-view or a cross-section of the atmosphere. It's as if you've taken a slice of the sky from the ground up to the upper atmosphere and are looking at it from the side. This "curtain" of data shows what's happening at different altitudes (York et al., 2021).
Discrete Return LiDAR
Think of discrete return LiDAR as an expert photographer who selects the best moments to take a picture. It sends out pulses of light and captures specific, strong echoes that bounce back. Each of these echoes is like a clear snapshot of the object it hit, whether it's a tree, building, or the ground. By putting together these snapshots, discrete LiDAR creates a detailed map of the environment. It's particularly good for tasks like surveying land, monitoring forests, or planning urban areas, where you need a clear and precise view of the surface features.
Application: Topographic Mapping and Urban Planning
Discrete return LiDAR acts like a sharp-eyed surveyor, capturing clear snapshots of the earth’s surface. It's widely used in creating detailed topographic maps, which are essential for civil engineering, construction, and land development. Urban planners and architects also rely on this technology for designing cityscapes, as it provides accurate measurements of buildings, roads, and other urban features. In forestry, it helps in assessing forest density, tree height, and biomass, which are crucial for forest management and conservation efforts.
Full Waveform LiDAR
Full waveform LiDAR is like a filmmaker who records every second of an event to capture the entire story. Instead of just picking certain moments to record, it captures the continuous, detailed echo of the entire light pulse. This continuous recording provides a lot of rich information, showing not just the surface of objects but also the layers and structures within them. Imagine being able to see not only the forest but also the branches and leaves within the trees. Full waveform LiDAR is excellent for complex environments where every detail is important, like studying the structure of vegetation or analyzing the detailed layout of a city.

This illustration showcases an airplane equipped with LiDAR technology emitting laser pulses toward the ground. On the left, we see a representation of discrete LiDAR, where individual, distinct reflections are captured at specific points. On the right, the full waveform LiDAR is depicted, capturing the continuous, detailed echo of the laser pulse as it interacts with various surfaces. This visual comparison highlights the nuanced ways in which LiDAR technology can interpret and record the physical world (Farraz et al., 2009)
Application: Environmental Studies and Complex Terrain Analysis
Full waveform LiDAR is like a storyteller that captures every nuance of the environment. This comprehensive approach is ideal for ecological studies, such as examining the structure and layers of forest canopies or assessing biodiversity. Scientists use it to analyze complex terrain and vegetative structures, providing insights into ecosystem health and function. Additionally, full waveform LiDAR is beneficial in geological research, helping to understand the morphology of landscapes, detect changes over time, and assess natural hazards like landslides or floods.
Each type of LiDAR offers a unique way of looking at the world. Photon counting LiDAR is for ultra-sensitive detection of distant or faint objects. Discrete return LiDAR is ideal for clear, detailed mapping of surfaces. Full waveform LiDAR provides in-depth information, capturing the full 'story' of the scanned area. Together, these technologies provide powerful tools for understanding and exploring our world in different ways. Let’s look at a scenario to make better sense of all this.
LiDAR: An Active Remote Sensing Technique
An essential aspect of LiDAR technology that sets it apart from many other remote sensing methods is that it's an active, not passive, technique. This distinction is key to understanding its capabilities and advantages.
The heart of LiDAR's active nature lies in its use of a self-generated light source – the laser. Unlike passive remote sensing systems that rely on external light sources, like the sun or ambient light, LiDAR emits its own laser pulses to illuminate the target and capture data. Because LiDAR systems generate their own light, they are not dependent on external light sources. This independence allows LiDAR to operate effectively in a variety of conditions, including complete darkness, overcast weather, and even in relatively foggy or misty environments. LiDAR actively interacts with the environment by sending laser pulses and directly measuring the reflections. This active engagement with the target provides highly accurate distance and elevation measurements.
Passive remote sensing systems on the other hand, like traditional cameras or photogrammetry, rely on reflected sunlight or artificial light. They are limited by lighting conditions and cannot function effectively in the dark or in poor visibility conditions. LiDAR's active nature gives it a significant advantage in terms of consistency and reliability of data, regardless of the time of day or atmospheric conditions.LiDAR's active sensing capability is particularly advantageous in applications like:
Topographical Mapping: Offers consistent results regardless of daylight or weather conditions.
Autonomous Vehicles: Provides reliable navigation data, critical for safety in varying lighting conditions.
Environmental Monitoring: Enables studies in diverse environments and conditions, including nocturnal wildlife surveys or cloud cover assessments.
The active nature of LiDAR technology makes it a versatile and reliable tool for accurate 3D mapping and data collection. Its ability to operate independently of external light sources opens up a wide range of applications, from urban planning and infrastructure development to environmental conservation and autonomous vehicle navigation.
Flight Over the Forest: A LiDAR Survey Scenario:
Imagine you're a surveyor tasked with mapping a large, dense forest. Your tool for this mission? An airplane equipped with a state-of-the-art LiDAR system. As you prepare for takeoff, you're keenly aware of how LiDAR's capabilities, like understanding 'returns' and dealing with 'laser footprint' and 'beam divergence', will be crucial for your success.
As the plane takes to the skies, the LiDAR system starts its work. It sends out rapid laser pulses towards the ground below. But here's where it gets interesting – not all laser pulses behave the same way. Some of these lasers hit the top of the trees and bounce back immediately, these are the 'first returns.' They give you information about the canopy height. But some pulses penetrate through the gaps in the foliage, reaching the forest floor and bouncing back as 'last returns.' These last returns are crucial for understanding the actual ground level.
The ‘Magic’ of Multiple Returns
Your LiDAR system is advanced enough to capture 'multiple returns.' This means it can record various points where the laser hits as it travels down through the branches and leaves. This ability is like having x-ray vision; it allows the LiDAR to "see" through the canopy and provide a detailed picture of the forest's structure – both above and below the tree line.
Dealing with Laser Footprint and Beam Divergence
As you fly over the forest, the concept of 'laser footprint' becomes crucial. The laser footprint is the area on the ground hit by the laser pulse. If you're flying high, the footprint is larger, like shining a flashlight from a height – the light covers a wider area. But here's the catch: a larger footprint might mean less detail.
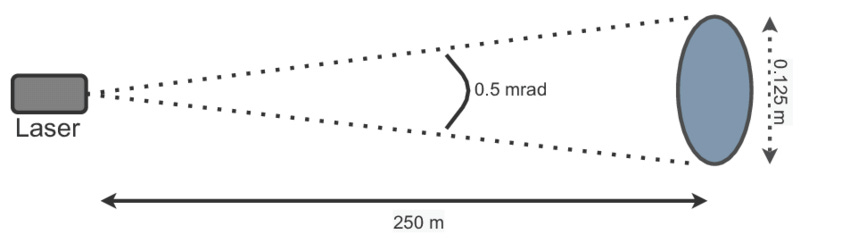
Diagram Detailing Laser Beam Divergence (Cunha, 2022)
Then there's 'beam divergence.' This is like the spreading of the laser beam as it travels downwards. A beam with higher divergence will cover a larger area but with less precision. For the dense forest below, controlling this divergence is key to getting accurate data.
The Surveyor's Challenge: Balancing Height, Speed, and Accuracy
Your challenge as a surveyor is to balance the flying height, speed, and LiDAR scanner settings. Fly too high, and you might miss finer details. Fly too low, and you risk not covering enough area or getting tangled in the complexities of the forest canopy. It's a delicate dance in the sky, maneuvering the plane to ensure the LiDAR captures the best possible data.
Another Trade-off: Point Spacing vs. Flight Speed
Point spacing in LiDAR is like the resolution of a photograph – the closer the points, the higher the resolution, and the more detailed the image. To achieve higher point density (closer spacing), you need to slow down the airplane. Slower flight speed allows the LiDAR system to send and receive more pulses over a given area, capturing finer details like small undulations in the ground or subtle variations in the canopy.
However, flying slower has its costs. It means more time in the air, which translates to higher fuel consumption and increased operational costs. Additionally, covering the entire forest at a slower speed would take much longer, possibly extending your survey over several days or even weeks.
Faced with this dilemma, you weigh your options. If the goal is to get the most detailed map possible, for instance, for a detailed environmental study or a precise construction plan, opting for a higher point density – even at a higher cost – might be the way to go. On the other hand, if the objective is to get a general overview of the terrain, perhaps for preliminary planning or broad-scale assessments, a lower point density (and thus a faster, more cost-effective flight) could suffice.
As an experienced surveyor, you make a calculated decision. You opt for a point spacing that strikes the right balance between the level of detail required and the project's budget and timeline constraints. This strategic choice ensures that the LiDAR survey is not only successful in capturing the necessary data but also efficient and cost-effective.

LiDAR Scan of Forest Canopy From Above (Kelly andi Di Tommaso, 2015)
Mission Accomplished: A Forest Revealed
As the flight concludes and you analyze the data, the forest's secrets are revealed in 3D. You see the undulating ground beneath the trees, the varying heights of the canopy, and even the subtle features that could never be seen from the ground. The LiDAR survey is a success, providing an invaluable map for conservationists, foresters, and surveyors.
Continuing the Adventure: The Role of the Inertial Mass Unit
As you marvel at the discovery of the ancient ruins, you remember another unsung hero of this mission – the IMU, or Inertial Measurement Unit, aboard the plane. Unlike its similarly pronounced but entirely different animal counterpart, the 'emu', the IMU in your surveying aircraft plays a crucial role in the accuracy of your LiDAR data.
What is an IMU?
Imagine you’re on a ship in the middle of a stormy sea, trying to map out the ocean floor. To do this accurately, you need to know exactly how the ship is moving – tilting, rising, falling, or swaying. An IMU does something similar for the airplane. It’s a sophisticated device that constantly measures and reports how the plane is moving in all three dimensions – up and down, side to side, and forward and backward, along with its orientation.
As the plane flies over uneven terrain and is buffeted by winds, it moves in ways that could affect the LiDAR's measurements. If the plane tilts or changes altitude suddenly, it could make the ground seem higher or lower than it is. The IMU tracks all these movements precisely, ensuring that the LiDAR data is accurate regardless of how the plane is moving.

Obtained from https://en.wikipedia.org/wiki/Inertial_measurement_unit
Fusing IMU Data with GPS and LiDAR
To create a perfect picture of the ground below, the IMU's data is combined, or 'fused', with information from the GPS and the LiDAR system. Here’s how:
1. GPS Provides Location: The GPS on the plane gives precise geographic coordinates for where the LiDAR data is being collected.
2. LiDAR Measures Distance: The LiDAR system is busy sending out laser pulses and measuring how long they take to bounce back, which tells you how far away the ground is.
3. IMU Adds Context: The IMU adds crucial information about the plane's movement and orientation at the exact moment each laser pulse is sent and received.
4. Data Fusion for Accuracy: By combining all this data – the GPS location, the LiDAR distance measurements, and the IMU movement data – you get a very accurate 3D map of the terrain. This map is not distorted by the plane’s movements, thanks to the IMU’s input.
The Final Piece of the Puzzle: Reference Frames in Aerial LiDAR Surveying
As your journey over the forest comes to an end and you think about the data you've gathered, you realize there's another important concept in play – the idea of reference frames. These frames are like different perspectives or points of view that help make sense of the LiDAR data.
Scanner's Reference Frame: The Local Perspective
Think of the scanner's reference frame as a local, up-close view of the world. This is the perspective of the LiDAR scanner itself. As the scanner sends out laser pulses and collects data, it records information relative to its own position and orientation. It's like taking notes from your own viewpoint – you know where everything is in relation to where you're standing or moving.

Diagram Illustrating the Role of Reference Frames (Columbo et al., 2010)
In our story, as the airplane moves over the forest, the LiDAR scanner onboard is constantly mapping the terrain below, but all this mapping is based on the scanner's current location and movement. This is great for collecting detailed local data, but without additional context, it's like having a detailed sketch without knowing where in the world the sketch fits.
Global Reference Frame: Tying It to the Real World
This is where the global reference frame comes in. It's like stepping back to get the big picture. The global reference frame ties the scanner's local data to a specific location on Earth. This is primarily done using GPS data, which provides accurate geographical coordinates.
Tying Scans Together and to the Global Position
1. Relative to Each Other: As the plane flies, the scanner captures multiple 'snapshots' of the ground. Each of these snapshots is accurate in the scanner's reference frame but needs to be connected to the others. By knowing how the plane and the scanner move relative to each other, you can stitch these snapshots together accurately, like assembling a jigsaw puzzle.
2. Anchoring to the Globe: Each of these connected snapshots is then anchored to a location on the globe using the GPS data. This ensures that every point in your LiDAR data is not just accurately placed in relation to other points, but also accurately positioned on Earth's surface.
Now let’s start analyzing this data!
The Power of Last Returns
As your aerial LiDAR survey progresses over the dense forest, you decide to focus on a specific aspect of the data: the last returns. These are the echoes that make it to the forest floor, bypassing the canopy and mid-level vegetation, and they hold the key to uncovering what lies beneath the thick forest cover.
While the first returns tell you about the height of trees and the canopy structure, it's the last returns that provide insight into the ground level. By filtering out everything but these last returns, you can essentially 'peel back' the forest canopy in your data, revealing the contours and features of the earth below.
A Surprising Discovery!
As you scrutinize the point cloud generated from the last returns, something unusual catches your eye. Amidst the expected undulations of the natural terrain, a series of unnatural, geometric patterns emerge. These patterns are too regular, too symmetric to be formations of natural origin. A wave of excitement washes over you as you realize what you might have just discovered – the remnants of an ancient civilization, long hidden beneath the forest canopy!
The patterns suggest the presence of structures – possibly the foundations of buildings, walls, or even a complete settlement. This discovery could be a significant archaeological find, offering a glimpse into a forgotten chapter of history. The ruins, invisible from the sky and inaccessible on the ground due to the dense forest, have remained undisturbed for centuries, only to be revealed now through the power of LiDAR technology.

Ancient ruins beneath a forest canopy revealed with a LiDAR-derived Digital Elevation Model (Goretti, 2024)
Overall, aerial LiDAR offers many advantages can scan vast swaths of terrain in relatively short amounts of time. However, flight operational and logistics costs might add unnecessary overhead making it an impractical or untenable solution for many businesses and research teams. Moreover, what if the problem at hand demands even higher point resolution than can be achieved with aerial LiDAR? Enter Terrestrial Laser Scanner (TLS) or Terrestrial LiDAR. Next, we will explore its functionality, particularly in static and mobile applications, including its use in self-driving cars. Let's continue our narrative to include these aspects. Now let’s shift gears and talk about LiDAR surveying on the ground!
The Ground Perspective – Terrestrial Laser Scanner (TLS)
As you land and step out of the airplane, you switch from the bird's-eye view of aerial LiDAR to the more grounded perspective of terrestrial LiDAR. This technology, while sharing the basic principles of its aerial counterpart, offers a different approach and set of applications.
Static Terrestrial LiDAR: Tying Scans Together:
Imagine setting up a tripod with a sophisticated camera in the middle of an architectural site. This is static terrestrial LiDAR. It scans the environment from its stationary position, creating a detailed 3D map of nearby structures. By setting up the scanner at different points around the site and performing multiple scans, you can capture the area from various angles.
Each scan is like a detailed drawing from one viewpoint. To get a complete picture, you need to tie these individual scans together. This is done using common reference points visible in multiple scans or by using external reference markers placed in the scanning area. The result is a comprehensive 3D model that accurately represents the site's dimensions and features.

In the distance, we see a reflector with a GPS atop (in red). The reflective surface is easily visible in scans collected by the main scanner which also has a GPS atop (Rusinek, 2020).
Mobile Terrestrial LiDAR: On the Move
Now, imagine mounting this scanning system on a moving vehicle. This is mobile terrestrial LiDAR, and it brings an additional layer of complexity and capability. As the vehicle moves, the LiDAR system continuously scans the surroundings, capturing data that shows not only the static world but also dynamic changes, like the flow of traffic or the movement of people.
Self-Driving Cars: A Prime Example
A prime example of mobile terrestrial LiDAR in action is in self-driving cars. These vehicles are equipped with LiDAR systems that continuously scan the environment. The LiDAR helps the car 'see' other vehicles, pedestrians, road markings, and obstacles, creating a live 3D map of its surroundings. This map is crucial for the car to navigate safely and efficiently through complex environments.
In self-driving cars, the LiDAR data is processed in real-time, providing immediate feedback for navigation decisions. The car's software fuses this data with inputs from other sensors, like cameras and radar, to make split-second driving decisions, ensuring safety and smooth travel.
Terrestrial LiDAR, whether static or mobile, showcases the technology's versatility. In static applications, it's invaluable for surveying, construction, and archaeological documentation. In its mobile form, it becomes a critical component in the rapidly evolving field of autonomous vehicles, representing a significant step towards a future where technology and mobility converge.
Indeed, the challenge of low point spacing in the LiDAR systems of self-driving cars is a critical aspect to explore. It has significant implications for the vehicle's ability to accurately detect and respond to its environment. Let's integrate this challenge into the narrative.

Assembling a Comprehensive Beach Panorama from Multiple LiDAR Scans with GPS Integration (Rusinek, 2020)
Navigating the Streets: The Challenge of Point Spacing in Self-Driving Cars
As our story transitions from the skies to the streets, we encounter a new protagonist: the self-driving car, equipped with its own LiDAR system. While this LiDAR shares the same basic principles as the aerial and terrestrial types, it faces a unique challenge – the need for real-time, accurate object detection with relatively low point spacing.
Understanding Point Spacing in LiDAR
Point spacing refers to the density of the data points collected by the LiDAR system. In aerial LiDAR, high point spacing provides a detailed picture of the terrain. However, in the fast-paced world of a moving car, the LiDAR system has to make do with lower point spacing. This is because the car needs to constantly update its 'image' of the surroundings to react promptly – there’s simply not enough time to collect a high density of points since the scanner has to physically spin around 360 degrees to capture points.
The Real-Time Challenge:
Imagine driving through a busy city street; things can change in the blink of an eye – a pedestrian might step off the curb, a cyclist could swerve into your lane, or a car might suddenly brake. The LiDAR on a self-driving car needs to detect these changes instantly and accurately, despite having less detailed data due to lower point spacing.
Advanced Algorithms to the Rescue:
To overcome this challenge, self-driving cars rely on sophisticated algorithms. These algorithms are designed to interpret the available LiDAR data effectively, even if it's less dense. They use advanced techniques like pattern recognition, machine learning, and predictive modeling to identify objects, assess their speed and trajectory, and predict potential hazards.
Moreover, self-driving cars don’t rely solely on LiDAR. They combine it with data from other sensors, like cameras and radar. This sensor fusion provides a more comprehensive view of the surroundings, compensating for the lower point spacing of LiDAR. It’s like piecing together different clues to get a complete picture of a situation.
Safety and Efficiency in Navigation
Through these advanced technologies, self-driving cars can navigate safely and efficiently, even in complex urban environments. The algorithms process the continuous stream of data, enabling the car to make informed decisions, like when to slow down, change lanes, or stop, ensuring the safety of its passengers and others on the road.
Integrating information about the LAS 1.2 format, a common file format used for storing LiDAR data, is a great idea to give your readers an understanding of how LiDAR data is structured and stored. If you have a table that outlines the data format, it would be an excellent addition to your article. Here's how you can introduce and discuss the LAS 1.2 format:
Understanding LiDAR Data Through the LAS 1.2 Format
A key aspect of working with LiDAR data is understanding how it's stored and organized. The LAS 1.2 file format is a standard in the industry for storing LiDAR point cloud data. This format not only holds the spatial coordinates of each point but also a range of other valuable information.
The LAS 1.2 format is structured to provide a comprehensive set of data for each point captured by a LiDAR system. If you have a table that details this format, it would be a beneficial visual aid for readers to understand the various components. Generally, the format includes:
Point Data: The core of the file, containing the XYZ coordinates of each point. This represents the spatial location of the point in a 3D space.
Intensity Values: Each point often includes an intensity value, which represents the return strength of the laser pulse. This can be useful for understanding the reflective properties of the surface that was hit.
Return Number: This indicates the order in which the reflected pulse was received (e.g., first return, last return). It's important for understanding the structure of the object that was scanned.
Number of Returns: For each laser pulse, this shows the total number of returns detected. This data is crucial for applications like forest canopy analysis.
Classification: Points are often classified into categories like ground, vegetation, building, etc. This helps in quickly filtering the data for specific analysis.
Time Stamp: Each point can have a timestamp, indicating the exact time the point was recorded. This is especially important for mobile and airborne LiDAR systems.
The LAS 1.2 format's structured approach to data storage makes LiDAR data versatile and informative. It allows users to not only visualize the physical features of the scanned area but also analyze the characteristics of those features based on intensity, return patterns, and classifications.

By discussing the LAS 1.2 format, you provide readers with insights into the technical aspects of LiDAR data storage and the depth of information that LiDAR technology can capture. This understanding is crucial for anyone working with LiDAR data, from data analysts to researchers and engineers.
Green Light LiDAR vs. Near-Infrared LiDAR
LiDARs typically make use of two different wavelengths of light, green and near-infrared. The primary difference lies in the wavelength of the light they use. Near-infrared LiDAR operates in the infrared spectrum, typically around 1550 nm, which is beyond the range of human vision. Green-light LiDAR, as the name suggests, uses light in the green spectrum, around 532 nm, which is visible to the human eye.
Green Light LiDAR: Penetrating Water
Green-light LiDAR is particularly effective in penetrating water, making it ideal for hydrographic surveying and underwater topography mapping. The green wavelength can travel through the water more efficiently than infrared, allowing it to reach and map the seabed. This makes green light LiDAR a powerful tool for studying coastal environments, mapping coral reefs, and surveying riverbeds.
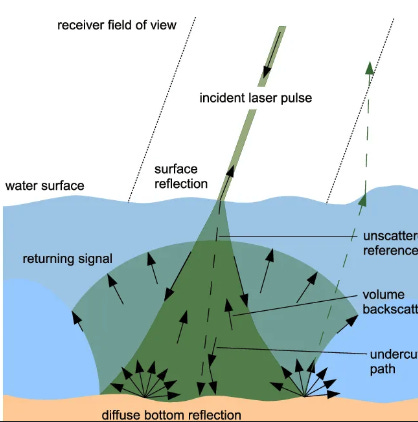
Diagram illustrating the refined geometric modeling of laser pulse propagation in airborne LiDAR bathymetry (Richter et al. 2021).
Near-Infrared LiDAR: Versatility in Various Conditions
Near-infrared LiDAR, on the other hand, is more commonly used in terrestrial and aerial surveying due to its effectiveness in a wide range of atmospheric conditions. It is less susceptible to scattering in the atmosphere, providing clearer and more accurate measurements over long distances. This makes it suitable for applications like forestry, urban planning, and agricultural monitoring.
Safety and Visibility Considerations
Another consideration is safety and visibility. Near-infrared light is invisible to the human eye and generally considered safer for the eyes at certain power levels, which is advantageous in populated areas. Green-light, while visible, can be more easily detected by sensors and cameras, which can be beneficial in specific surveying contexts.
Now as fancy as all this sounds, LiDAR is useless without a skilled technician to calibrate the instrument!
LiDAR Isn't Perfect On Its Own: The Crucial Role of Calibration
When it comes to LiDAR technology, precision is key, but it's important to remember – LiDAR isn't infallible on its own. To unlock its full potential, calibration is essential. Without proper calibration, even the most advanced LiDAR system can fall short in accuracy. Here’s why calibration is crucial and how it's done:
1. Achieving Accuracy with Internal Calibration:
Think of a LiDAR system as a finely tuned instrument. Internal calibration ensures that each part of this instrument – the laser, the scanner, the detector – is working in perfect harmony. Adjusting the timing, alignment, and intensity settings is akin to tuning a violin for a concert.
2. Field Calibration for Real-World Accuracy:
Field calibration is like a dress rehearsal. It involves testing the LiDAR system in environments similar to where it will be used. By scanning known targets and comparing the results with expected values, the system is fine-tuned to accurately reflect real-world conditions.
3. Boresight Calibration for Alignment:
Proper alignment is crucial, especially when LiDAR is mounted on moving platforms like planes or cars. Boresight calibration adjusts the LiDAR's line of sight, ensuring that its view is perfectly aligned with the navigation systems. It’s like aligning the sights of a telescope to get a clear view of the stars.
4. Reflective Targets for Reflectivity Calibration:
By using artificial targets with known reflective properties, the LiDAR’s ability to measure reflectivity can be calibrated. This step ensures that the system correctly interprets different surface materials, from the leaves of a tree to the asphalt of a road.
5. Software Calibration for Data Integrity:
Software plays a pivotal role in interpreting LiDAR data. Calibration at this stage involves refining algorithms for noise reduction, point classification, and atmospheric correction. It’s similar to editing a film, where the raw footage is transformed into a coherent and accurate story.
6. Cross-Validation with Other Technologies:
Cross-validation is like getting a second opinion. By comparing LiDAR data with information from other survey methods, any discrepancies can be identified and corrected, ensuring the LiDAR data is not just precise, but also accurate.
7. Routine Maintenance for Consistent Performance:
Regular check-ups and maintenance ensure that the LiDAR system continues to operate at its best, much like servicing a car to keep it running smoothly.
In essence, calibration transforms a LiDAR system from a powerful tool into a precise instrument of measurement. It’s the process that ensures LiDAR data is not just detailed, but also dependable and accurate, making it an invaluable asset in fields ranging from geology to urban planning.
The Unique Nature of LiDAR Points: Independent and Informative:
An intriguing aspect of LiDAR technology that often surprises many is the independence of each LiDAR point. Unlike pixels in a photograph, where the information can be influenced by adjacent pixels, each point in a LiDAR dataset stands alone, independently representing a specific location in three-dimensional space.
What do you mean independent?:
Each LiDAR point is generated from a direct measurement of distance based on the time-of-flight principle. When a laser pulse is emitted and reflects off a surface, the resulting point is a distinct measurement of that specific interaction. Moreover, every point in a LiDAR dataset has its unique set of coordinates (x, y, z) and, in some cases, additional attributes like intensity or return number. These coordinates are not influenced by the surrounding points but are solely the result of where the individual laser pulse hit and reflected from. This independence of points means that LiDAR can provide a high-fidelity representation of the scanned environment. Each point offers a discrete piece of information about the surface, resulting in a detailed and accurate 3D model.
The independence of each point allows for very detailed and precise surface modeling. LiDAR can capture the nuances of the environment, from the branches of a tree to the contours of a building. Since each point is independent, LiDAR is effective even in environments with obstructions. For example, in a forest, some pulses may be blocked by foliage, but those that reach the ground still provide accurate information. The independence of points also influences data processing techniques. Algorithms must consider each point separately, identifying and classifying them based on their individual attributes.
Understanding the Limitations of LiDAR Technology:
While LiDAR technology has transformed the way we map and understand the world, it is important to recognize its limitations. These constraints can impact its applicability in various scenarios:
Cost Implications:
The high cost of LiDAR systems, particularly advanced aerial and high-resolution setups, can be a significant barrier. This includes the expense of the equipment, operational costs, and data processing. However, costs have been dropping in recent years as manufacturers push the limits of LiDAR sensor technology!
2. Complex Data Processing:
LiDAR data requires sophisticated processing and analysis, often necessitating specialized software and skilled personnel, adding to the complexity and resource requirements.
3. Weather and Environmental Limitations:
Adverse weather conditions like heavy rain, fog, or snow can affect LiDAR's performance, scattering laser beams and potentially leading to reduced accuracy or data loss.
4. Challenges with Dense Vegetation:
LiDAR may struggle to accurately penetrate thick vegetation, posing challenges in mapping the ground surface in forested areas.
5. Dependence on Line-of-Sight:
The necessity for a clear line of sight to the target can limit LiDAR's effectiveness, especially in urban areas with obstructions or in heavily forested environments.
6. Limited Range:
The effective range of LiDAR systems, particularly terrestrial ones, can impact the accuracy and quality of the data, with effectiveness diminishing over longer distances.
7. Issues with Reflective Surfaces:
- Highly reflective surfaces can create anomalies in LiDAR data, as they may reflect excessive light, leading to inaccurate measurements.
8. Data Volume Management:
The substantial volume of data generated by LiDAR surveys demands significant computational power and storage capacity for effective management and analysis.
9. Absence of Color and Texture Information:
LiDAR does not capture color or texture details, which can be a limitation for applications where these aspects are crucial for analysis.
10. Power Supply Constraints:
Powering LiDAR systems, especially in remote or mobile applications, can be challenging. The need for a reliable and continuous power supply is critical, particularly for airborne or vehicle-mounted systems where power limitations can restrict operational time and flexibility.
AI and LiDAR: Revolutionizing 3D Object Detection
The fusion of AI with LiDAR technology is opening new frontiers, particularly in the field of 3D object detection. A prime example of this integration is the application of models like Li3Detr (LiDAR-based 3D object detection transformer), which represents a significant advancement in how we process and interpret LiDAR data.
How AI Enhances LiDAR Capabilities
Advanced Object Detection: AI algorithms, such as those used in Li3Detr, are trained to identify and classify objects within the 3D point clouds generated by LiDAR. These models can distinguish between cars, pedestrians, trees, and other elements in an urban or natural environment with high accuracy.
Efficient Data Processing: One of the key challenges with LiDAR is the sheer volume of data it generates. AI helps streamline data processing, rapidly analyzing vast point clouds to extract meaningful insights and information.
Improved Accuracy and Reliability: By applying machine learning and pattern recognition, AI models enhance the accuracy and reliability of LiDAR data interpretation. This is particularly crucial in applications where precision is paramount, such as autonomous driving.
Li3Detr: A Case Study in AI and LiDAR Synergy
Transformer Models in 3D Space: Li3DeTr leverages the transformer model architecture, typically used in natural language processing, and adapts it for 3D object detection in LiDAR data. This approach allows for more effective handling of the spatial relationships and complexities within 3D point clouds.
See this article for a more in-depth dive into Li3DeTr
Real-World Applications: The practical applications of this technology are vast. In autonomous vehicles, for instance, it can be used for real-time detection of obstacles, enabling safer navigation. In urban planning, it can assist in creating detailed 3D models of cityscapes, aiding in smarter city design and management.
Continuous Learning and Adaptation: AI models like Li3Detr can continuously learn and adapt, improving their object detection capabilities over time. This ensures that the integration of AI with LiDAR remains cutting-edge and evolves with changing environments and requirements.
Conclusion: LiDAR – A Technology of Precision and Potential
As we reach the end of our exploration of LiDAR technology, it's clear that LiDAR stands as a remarkable testament to human ingenuity in the field of remote sensing. From its ability to function effectively in complete darkness to its precision in mapping and surveying, LiDAR technology has proven to be an invaluable tool in various fields. We've delved into its technical aspects – from the types of LiDAR like aerial, terrestrial, and mobile, to the intricacies of data collection and processing, and the crucial role of calibration. We've also touched upon its limitations, which are important to understand for effectively leveraging this technology.
LiDAR's versatility, however, extends far beyond the realms of self-driving cars and standard topographical mapping. The upcoming article will shed light on the lesser-known yet equally fascinating applications of LiDAR. We'll venture into fields where LiDAR is making significant contributions, often in unexpected ways. From aiding in disaster management and archaeological discoveries to its role in forestry management and urban planning, the next piece will take you on a journey through the innovative uses of LiDAR that are shaping our world in remarkable ways.
Stay tuned for future blog posts as we uncover the diverse and impactful applications of LiDAR technology, demonstrating its potential beyond the typical use cases and highlighting how it continues to revolutionize our understanding and interaction with the world around us.
Thank you for reading, and I hope you have learned something. If you like this content, please like, share, and subscribe, it helps me out immensely.
References:
Colombo, Oscar & Brunker, Shane & Jones, Glenn & Janssen, Volker & Rizos, Chris. (2010). Wide-area, sub-decimetre positioning for airborne LiDAR surveys using CORSnet-NSW.
Cunha, Luís. (2022). ALFA-Pi: Generic LiDAR Ethernet Interface. 10.13140/RG.2.2.13497.65128.
Kelly, Maggi & Di Tommaso, Stefania. (2015). Mapping forests with Lidar provides flexible, accurate data with many uses. California Agriculture. 69. 14-20. 10.3733/ca.v069n01p14.
Ferraz, A., Bretar, F., Jacquemoud, S., Gonçalves, G.R., 2009. The Role of Lidar Systems in Fuel Mapping. In: Instituto de Engenharia de Sistemas e Computadores de Coimbra INESC - Coimbra. Conceptual differences between discrete (left) and full waveform (right) LiDAR systems. [fig.]. Available from: https://www.researchgate.net/figure/Conceptual-differences-between-discrete-left-and-full-waveform-right-LiDAR-systems_fig14_241475870 [Accessed 22 Feb, 2024].
Goretti, G., 2024. What Is Lidar and Why It Has Revolutionized Modern Archeology. DailyArt Magazine. Available at: https://www.dailyartmagazine.com/what-is-lidar/.
Richter, K., Mader, D., Westfeld, P., & Maas, H.-G., 2021. Refined Geometric Modeling of Laser Pulse Propagation in Airborne LiDAR Bathymetry: Verbesserte geometrische Modellierung der Laserpulsausbreitung in der Laserbathymetrie. PFG – Journal of Photogrammetry Remote Sensing and Geoinformation Science, 89. DOI: 10.1007/s41064-021-00146-z.
Rusinek, D., 2020. Analyzing the Effects of Hurricane Harvey on Dune Morphology and Coastline Loss Using Terrestrial Laser Scanning: A Case Study at Bryan Beach, Texas. [Electronic Theses and Dissertations]. Available at: https://hdl.handle.net/10657/6603.
Yorks, J.E., Selmer, P.A., Kupchock, A., Nowottnick, E.P., Christian, K.E., Rusinek, D., Dacic, N., McGill, M.J., 2021. Aerosol and Cloud Detection Using Machine Learning Algorithms and Space-Based Lidar Data. Atmosphere, 12(5), 606. https://doi.org/10.3390/atmos12050606 (Submission received: 26 March 2021 / Revised: 13 April 2021 / Accepted: 23 April 2021 / Published: 7 May 2021).
About the Author
Daniel Rusinek is an expert in LiDAR, geospatial, GPS, and GIS technologies, specializing in driving actionable insights for businesses. With a Master's degree in Geophysics obtained in 2020, Daniel has a proven track record of creating data products for Google and Class I rails, optimizing operations, and driving innovation. He has also contributed to projects with the Earth Science Division of NASA's Goddard Space Flight Center. Passionate about advancing geospatial technology, Daniel actively engages in research to push the boundaries of LiDAR, GPS, and GIS applications.